在之前技术分享的文章《不同构型eVTOL飞控算法实现的挑战》和《如何玩儿转控制参数设计?有哪些段位?》中,我们对仿真和控制问题进行了探讨,今天我们来聊一聊另一个非常重要的领域——系统辨识。
什么是系统辨识?
系统辨识是在输入和输出数据的基础上,从一组给定的模型类中,确定一个与所观测系统等价的模型。
——L. A. Zadeh(1962)模糊数学之父,美国加州大学控制论专家
仿真、控制、辨识 这三兄弟其实都是在围绕输入、输出与模型做文章,只不过关心的问题有所不同:
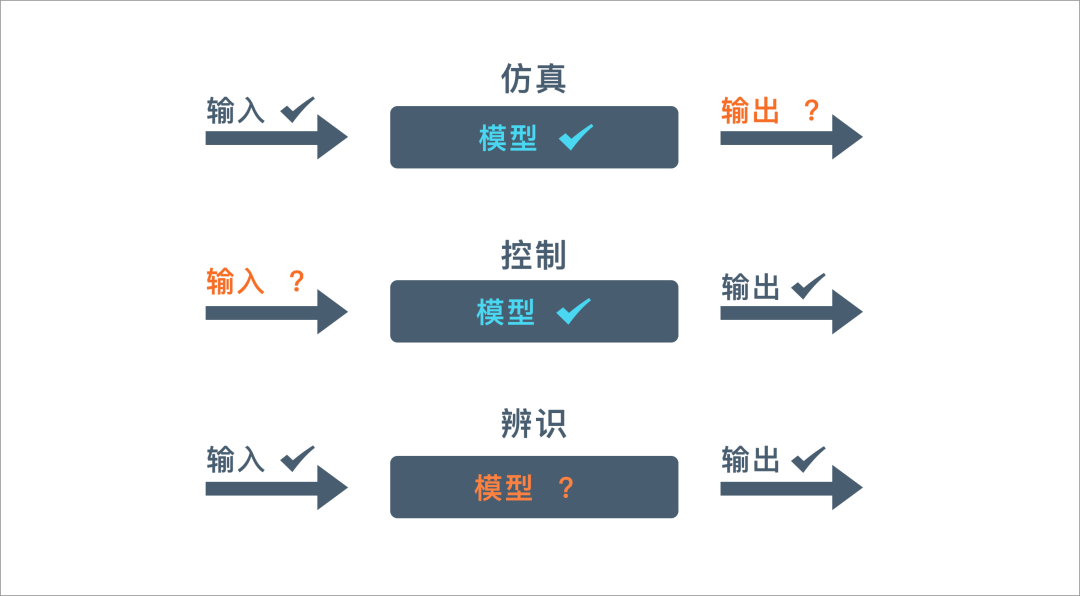
图 1 仿真、控制与辨识问题的差异
仿真:输入和模型已知,目的是得到输出。模型通常是基于对飞机特性的很多先验假设建立的,例如通过CFD计算或风洞测试获取建模所需的气动数据。
控制:控制模型通常是已知的或已设定的,关心的是如何设计控制输入,使输出能够满足需求。
辨识:输入和输出已知,想知道模型是什么。辨识所研究的其实是仿真和控制的逆问题。
为什么要做系统辨识?
想象一下这种情形:在研发过程中,作为飞控算法工程师的你通过“所谓的”正向的建模仿真,并根据操纵品质等需求完成了控制设计,仿真给出的各项指标都完美,但开始飞行测试的时候却惊讶地发现设计结果只是纸面富贵,飞行员边叹气边说这是他飞过的最难飞的飞机,而你也开始怀疑,CFD到底是Computational Fluid Dynamics?还是Colorful Fluid Diagrams?
为什么会这样?
可能是设计需求提的不合理,也可能仿真模型本身就有问题,而对于这两种可能原因,辨识都能帮到你
用途1:改进仿真模型
每个仿真模型在被证明无辜之前都是有罪的。
——Thomas H. Lawrence (1994)
西科斯基公司高级工程师,美国直升机协会年度论坛发言
系统辨识可以为仿真模型辩护,也有权把仿真模型送去改造。
通过飞行测试进行辨识,可以对理论预测和风洞测试获取的数据进行验证和改进,这对于控制律设计、飞行品质评估、构建供飞行员训练的高保真飞行模拟器等工作来说都非常重要。
例如,在下图中,VFW-614飞机用于直接升力控制(Direct Lift Control, DLC)的襟翼在较大正偏时通过飞行测试辨识得到的升力系数要显著低于风洞测试结果。在对DLC襟翼的效能根据辨识结果进行修正后,更准确的仿真模型被用于DLC襟翼的前馈控制律设计及驾驶员训练。
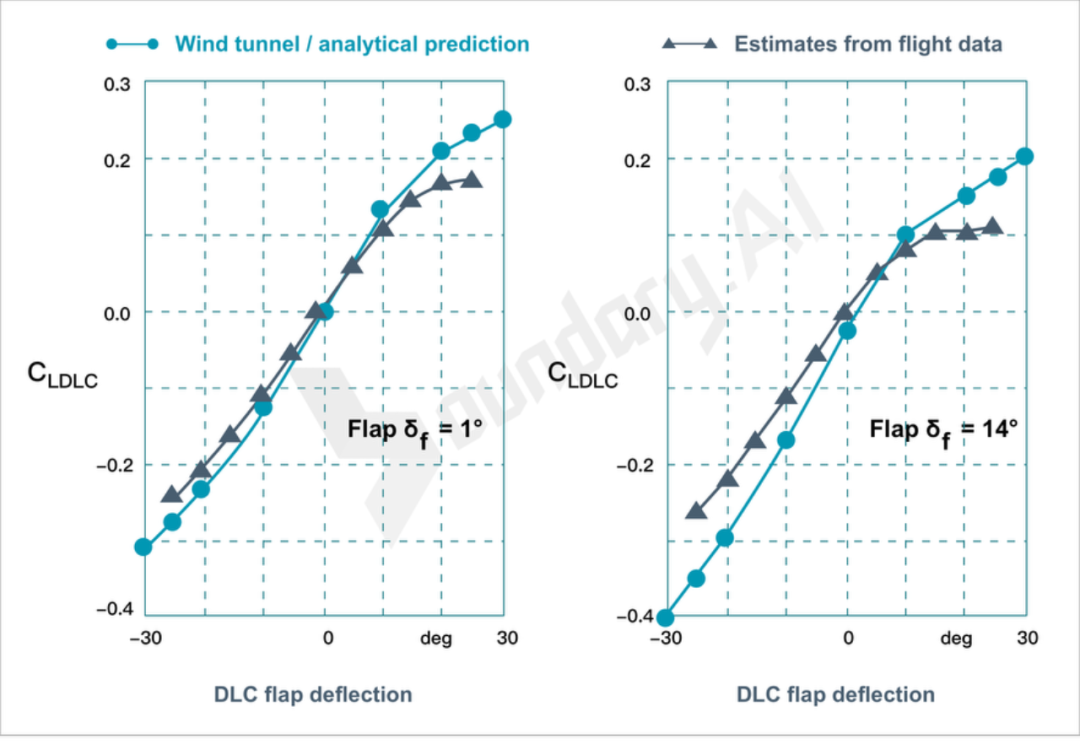
图 2 DLC襟翼效能风洞测试及飞行测试辨识结果对比
除了上例中的非线性模型辨识,对线性化模型的辨识也比较常见,这对一些飞行状态下的操稳特性与控制设计进行快速评估、验证很有帮助。例如下面这个例子,就是在对4阶固定翼横航向运动模型的大导数进行辨识。
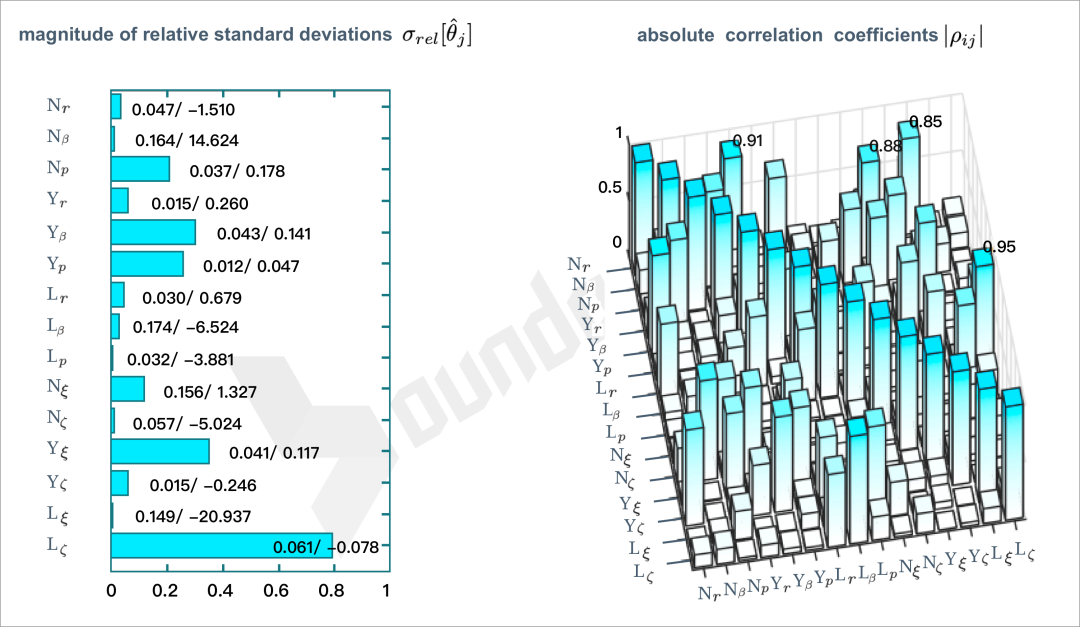
图 3 横航向运动大导数辨识结果(左图中括号的数据分别表示标准差和估计值,右图为相关系数)
用途2:评估实际性能
通过飞行测试检验飞机是否满足操纵品质需求也是辨识的一个重要应用方向。飞机实际的稳定裕度、闭环控制带宽、响应延迟等指标都可以通过辨识获得。
例如下面例子的左图中,是UH-60直升机通过频域辨识得到的滚转角扰动抑制带宽(Disturbance Rejection Bandwidth, DRB), 右图则是该飞机在不同构型和风扰条件下的DRB和对应的操纵品质评分(Handling Quality Rating, HQR)。
随着扰动抑制带宽的降低,飞行员对飞机表现的满意程度也有所下降。在这个示例中,我们可以不使用仿真模型,因为关心的是实际飞行DRB与HQR的关联性,进而根据实际HQR对控制律设计的DRB需求进行优化。
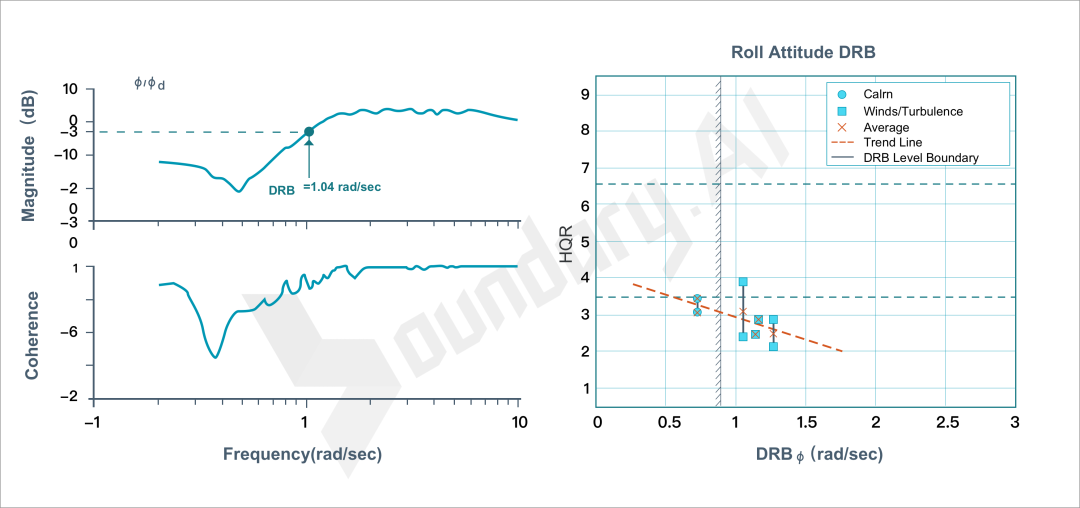
图 4 UH-60直升机在不同构型与风扰条件下的滚转角DRB与HQR关系
另一种情况是,需求是明确的,而设计阶段预测值与实际辨识得到的性能有较大差异,此时就需要通过辨识测试去校验、改进模型,直至通过仿真模型计算的预测值与实际飞行情况一致。
如何做系统辨识?
系统辨识工作主要有3个阶段:计划 、执行与确认。
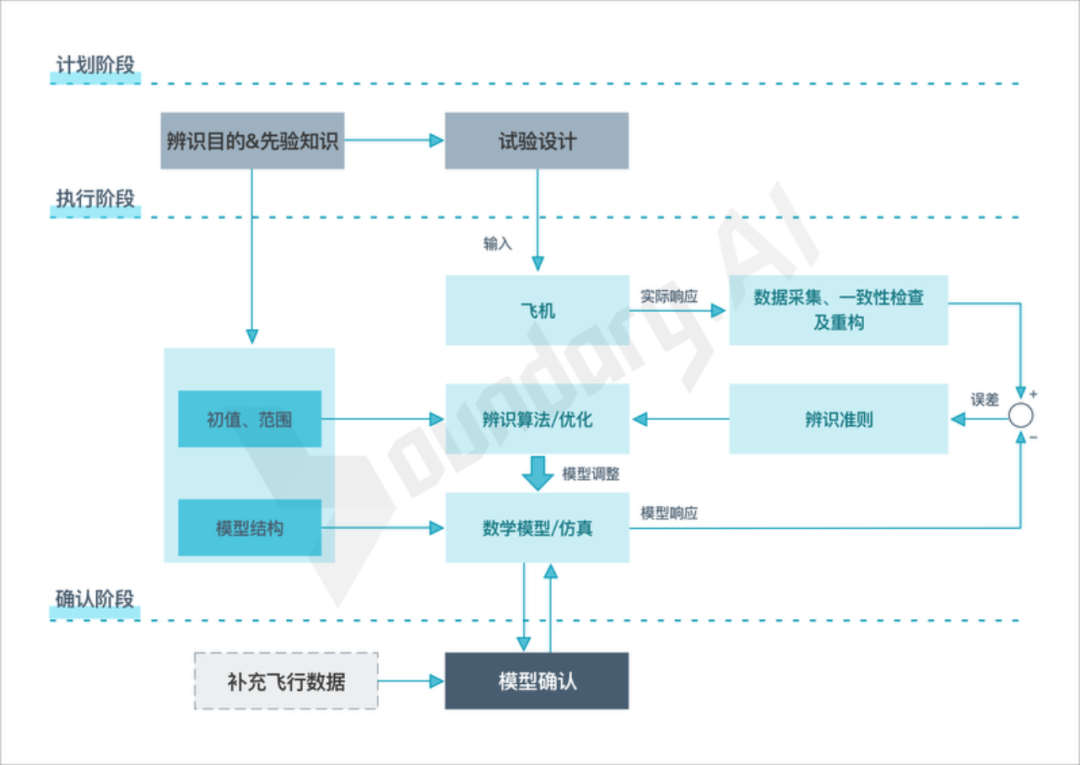
图 5 系统辨识流程图
01 计划阶段
首先需要根据辨识目的以及先验知识来设计辨识试验,明确飞行科目、输入信号激励、观测变量、试验时间长度、数据采集设备、采样频率等等。
一个好的试验设计应能充分激发所关心的飞行特性,再强大的辨识技术也没办法无中生有地通过飞机的静置数据辨识出动态表现。例如,假设关心的是飞机纵向短周期运动,由于其周期短、频率快,可采用"3211"信号来激发该模态。
几种典型的常见多阶跃信号能量谱如下图所示:
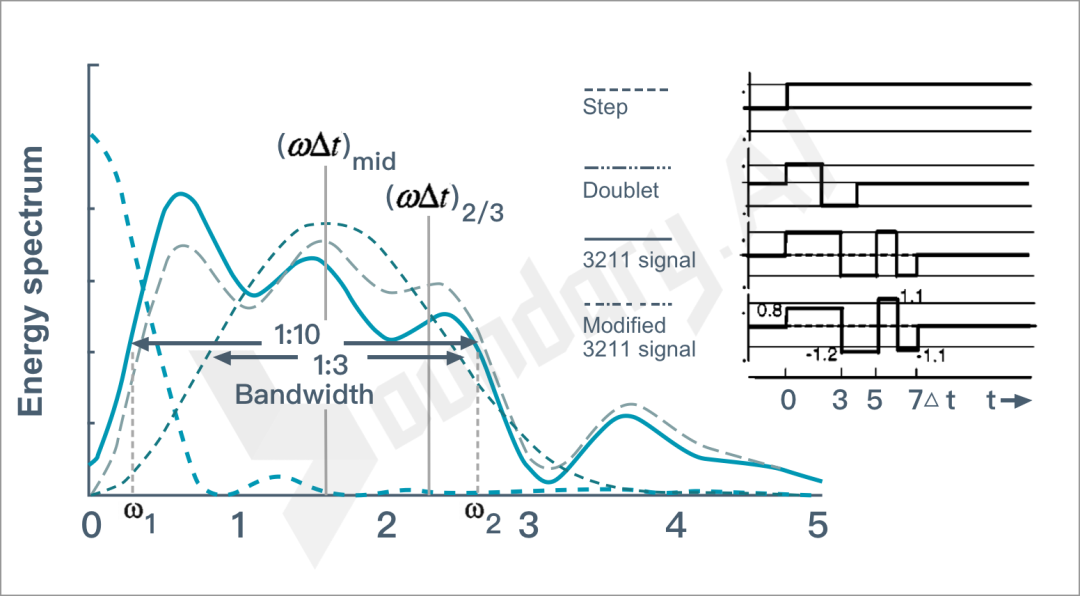
图 6 部分典型多阶跃信号能量谱
除了要注意测试能激发所关心的飞行特性,选择合适的数据记录采样频率与测试时间也非常重要,否则可能因为记录频率未能覆盖关心的频率、数据混叠等问题导致辨识工作功亏一篑。
一般而言,如果采集的观测量需要进行滤波,其截止频率建议不低于所关心最大频率的5倍,采样频率不低于滤波截止频率的5倍。对于扫频信号的记录时长,通常应为关心的最长周期时间的4~5倍以上。对于多输入多输出系统,需要记录更多观测量,最终整体的数据记录量正比于观测量×采样频率×记录时间,这就对记录设备的数据处理速度、存储空间和稳定性有较高的要求。
以边界智控自研的飞行数据记录设备(Flight Data Recorder, FDR)为例,该设备具备充裕的数据记录与读取性能,并已经应用于多个客户的多款机型,包括eVTOL和eCTOL机型,为客户在科研阶段和适航取证阶段采集了关键的数据。部分参数见下表供参考:

表 1 边界智控FDR产品及部分参数
02 执行阶段
在这一阶段,我们需要对模型类和其结构做出假设,然后对比模型响应与实际数据的区别,基于某种辨识准则,利用辨识算法找到这一准则下最匹配实际数据的模型。
关于模型类
视辨识目的和先验知识不同,需要采用的模型也不同。例如,模型可以是线性的或非线性的、离散或连续的、确定或随机的、参数或非参数的、频域或时域的,等等。
在多种多样的模型中,应该选择哪一种呢?我们的建议是:尽量简单,足够复杂。
也就是说,如果有多个模型都复杂到能充分表征待辨识的物理特性,那么一般会选取相对简单的那一个,因为简洁的模型通常更容易被解释,并且有更好的预测能力。例如,模型类别为多项式时,如果我们能用2阶多项式得到很好的辨识结果,就不会用64阶多项式,高阶复杂模型不仅更难解释,还更可能出现过拟合等问题。
关于辨识准则
辨识准则即衡量模型优劣的判断标准,通常以代价函数的形式存在,从而参数辨识被转换成优化问题。可使用的准则不唯一,例如我们可以采用最小二乘准则:希望模型在输出上的预测值与实际测得值的差值平方累加和尽可能小。
关于辨识算法
辨识算法可分为两大类:基于时域响应与基于频域响应,两者优势各异。例如我们在某客户的旋翼机型姿态响应带宽辨识上,由于该操纵品质本身就是在频域下衡量的,所以基于频域辨识会更便利;而对某客户的eVTOL机型在过渡阶段及固定翼阶段的推阻特性辨识,则选择了基于时域,因为我们重点关注的是推力与阻力随空速变化的非线性特征,这种情况下用时域辨识的方法更有优势。基于时域与频域的辨识方法更全面的对比见下表,供读者参考。
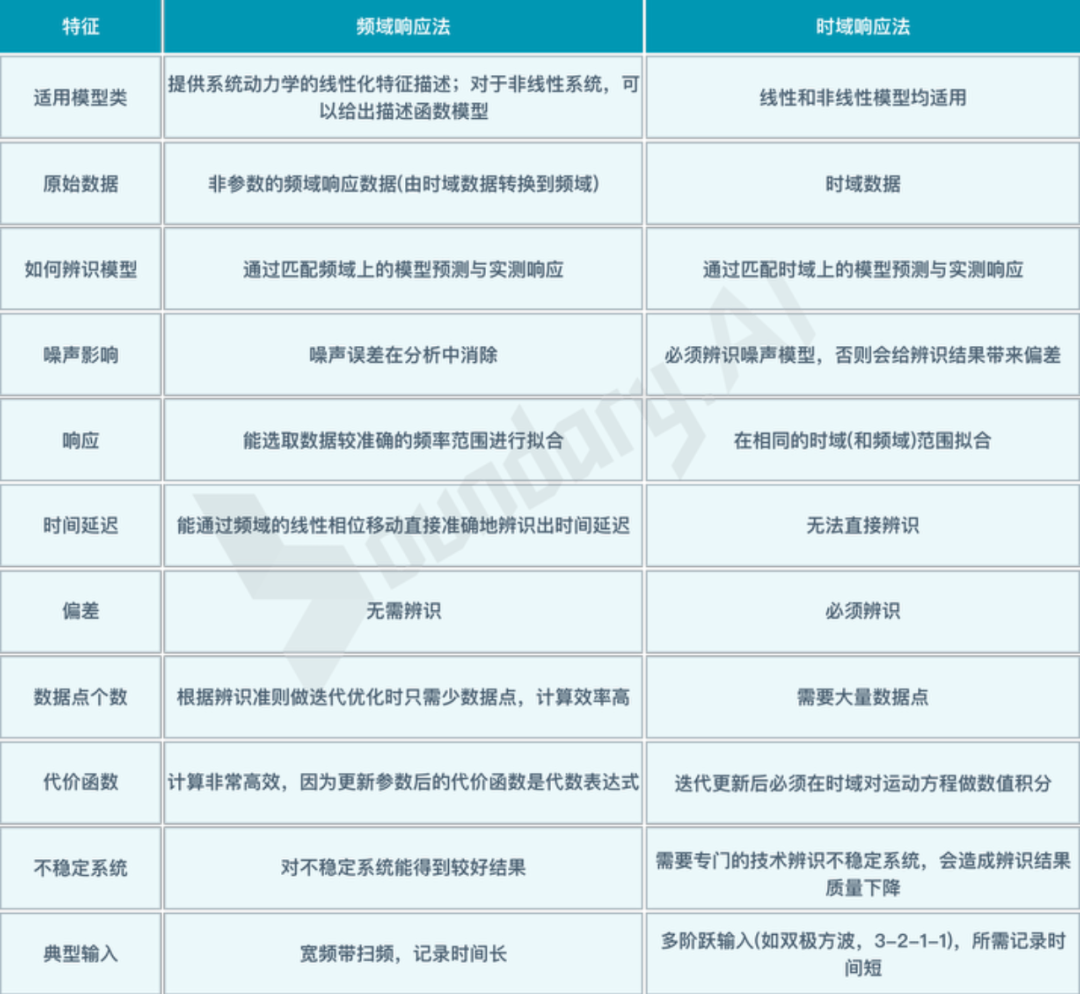
表 2 频域响应与时域响应法对比
03 确认阶段
最后一步,我们需要对辨识得到的模型做分析和确认,一是检查辨识出的参数值是否合理、准确,二是检查模型是否有良好的预测能力。
对模型预测能力的判断,可结合未被辨识使用过的数据进行对比分析。以下图为例,XV-15飞机的辨识横航向模型在另一段出现较大滚转角测试数据中也与实际响应相符,表明了模型的有效性。
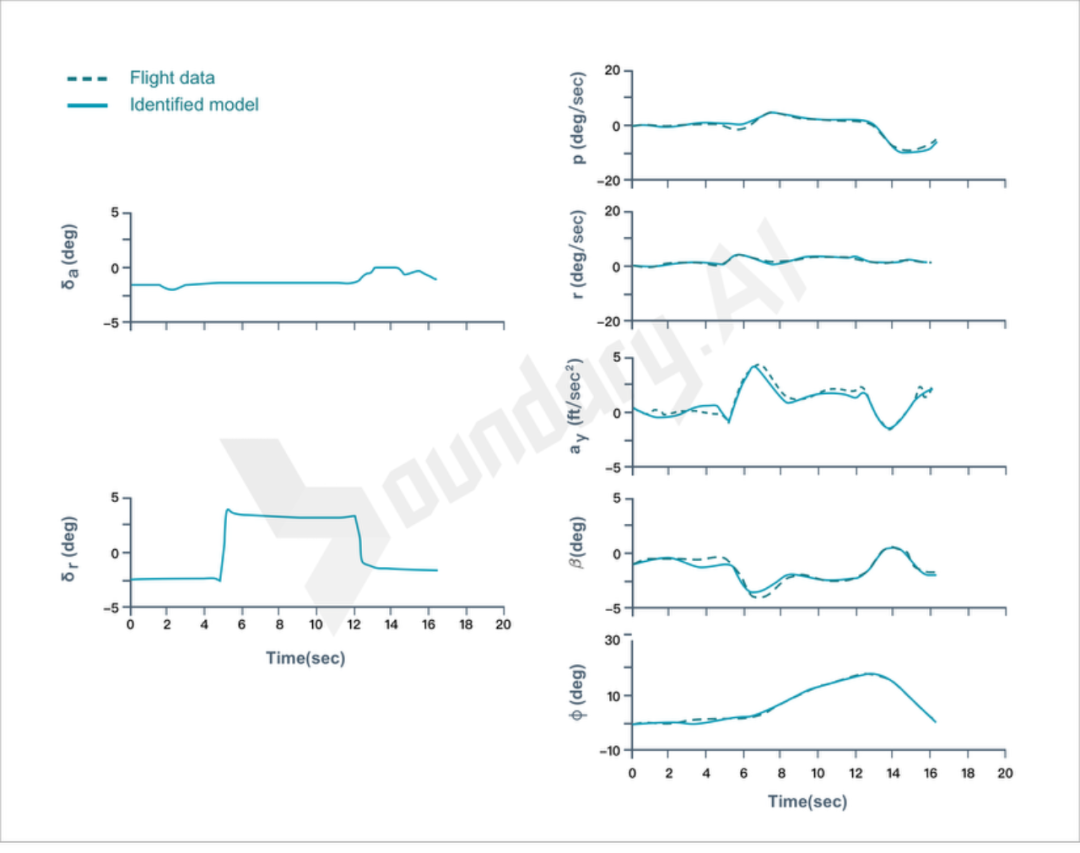
图 7 XV-15模型的偏航操纵验证
应用示例
通过飞行测试辨识幅值、相位裕度
对系统辨识有了基本了解后,我们来看看实际项目中的应用。这里我们以边界智控内部用于算法原型验证的倾转旋翼机型为例,使用系统辨识的方法,需要确认飞机在飞行包线内不同工作点的稳定裕度。在这些工作点之中,我们先来考察旋翼构型悬停工况下俯仰轴指令处的实际表现。
在设定好需要叠加的自动扫频信号后,我们进行了两次扫频试验,并将对应的时域数据拼接在一起,这样做能获得更可靠的频域数据,如下图所示:
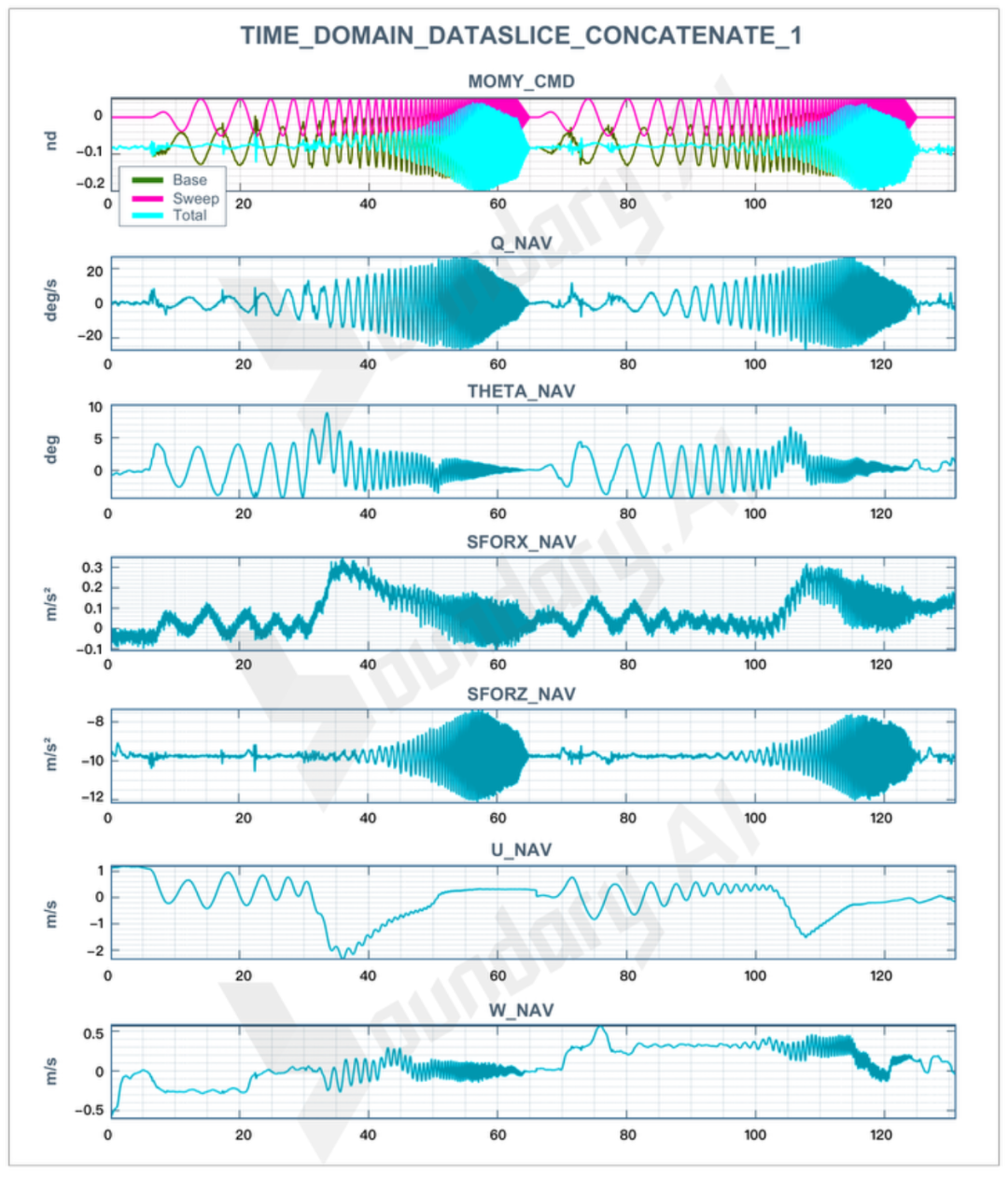
图 8 扫频辨识试验时域数据
接下来,我们采用间接法,以俯仰轴指令叠加的扫频信号为输入,以俯仰轴最终的指令为输出,再做一些简单的运算处理,就能够获得实际的幅值相位裕度信息了,辨识结果与仿真模型的对比结果如下所示。可以看到,辨识得到的稳定裕度与仿真模型预测值比较接近,并且满足设计需求。需要注意的是,悬停工况稳定裕度的标称需求值比较低是因为有可靠的仿真模型,并且满足不确定性下的概率需求。
接下来怎么做?
当然是对旋翼、倾转及固定翼构型下的各前飞速度工作点实际稳定裕度也进行试飞确认,不过在这些工作点,我们的初始设计稳定裕度比较保守,甚至比AS94900A等标准的要求还要略高一些,因为倾转过渡阶段的动力与气动特性更复杂,不确定性相对更高,需要通过试飞测试修正模型并逐渐放宽稳定性需求。可见,过渡工况凸显了系统辨识的重要性,它就像一面镜子,映射出设计的不足,让我们得以持续改进。
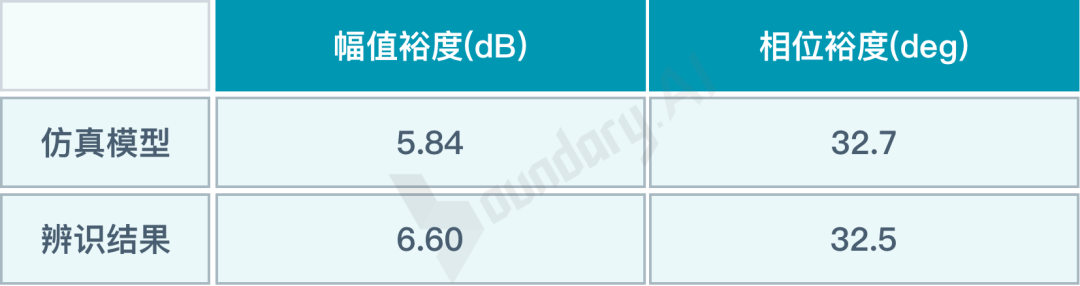
表 3 仿真模型与试飞辨识的稳定裕度对比
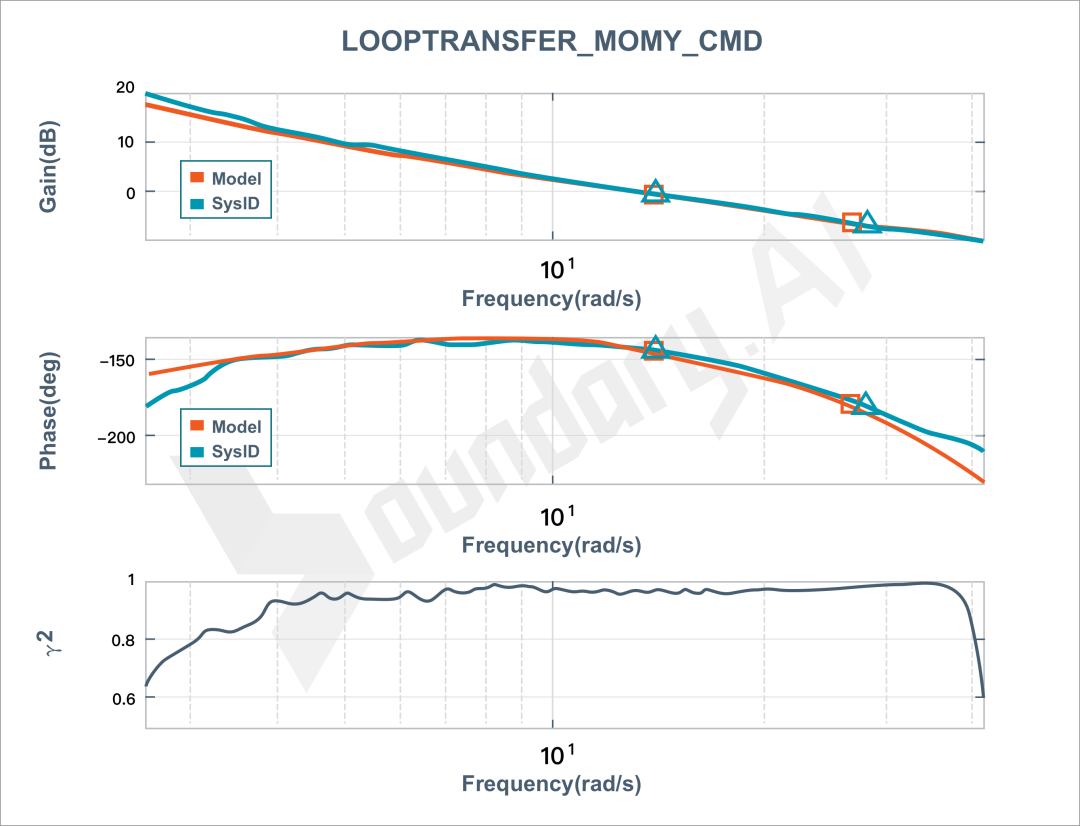
图 9 辨识与仿真模型的频域响应对比
eVTOL的系统辨识
对于eVTOL这种新构型飞行器,如果完全依赖传统的计算和试验方式(如风洞试验)进行建模,一方面费时费力费钱 ,另一方面很难保证模型的准确性。
事实上,相比于传统民航客机,eVTOL尺寸相对较小,并且可以通过预设飞行任务自动飞行或地面遥控飞行等方式进行试飞活动,可较大程度上减少飞行试验成本,并降低测试风险。因此,结合飞行试验的系统辨识,是eVTOL新构型研制过程中的重要手段之一。
为了应对这一挑战,我们开发了一系列SISO、MIMO辨识、数据一致性检查、结果验证等软件工具,以及数据记录仪等设备,同时在多款eVTOL机型上不断积累经验,希望对eVTOL从业者有所帮助。如有不完善之处还望大家谅解并指出,若有不同看法,也欢迎关注公众号留言交流。
引用文献
1. Jategaonkar R, Fischenberg D, von Gruenhagen W. Aerodynamic modeling and system identification from flight data-recent applications at DLR. Journal of Aircraft. 2004 Jul;41(4):681-91.
2. Hosseini B, Steinert A, Hofmann R, Fang X, Steffensen R, Holzapfel F, Göttlicher C. Advancements in the theory and practice of flight vehicle system identification. Journal of Aircraft. 2023 Sep;60(5):1419-36.
3. Zadeh LA. From circuit theory to system theory. Proceedings of the IRE. 1962 May;50(5):856-65.
4. Berger T, Ivler C, Berrios MG, Tischler MB, Miller D. Disturbance rejection handling qualities criteria for rotorcraft. 72nd Annual Forum of the American Helicopter Society, West Palm Beach, USA 2016 May 16.
5. Tischler MB, Remple RK. Aircraft and rotorcraft system identification. Reston, VA: American Institute of Aeronautics and Astronautics; 2012 Aug.
6. Morelli EA, Grauer JA. Advances in Aircraft System Identification at NASA Langley Research Center. Journal of Aircraft. 2023 Sep;60(5):1354-70.
7. Morelli EA, Klein V. Aircraft system identification: theory and practice. Williamsburg, VA: Sunflyte Enterprises; 2016 Dec.