目前世界各地不同构型的eVTOL概念设计已经有数百个,关于eVTOL构型的讨论也持续不断。关于不同构型性能之间的优劣,目前业界暂时没有达成一致的意见。
边界智控团队曾经主导设计或深度参与倾转旋翼、复合翼、多旋翼等多种机型的飞控系统开发。 今天,我们与大家分享我们从飞控的角度来看到的各种构型之间的差异。
目前主流的eVTOL构型分为以下几类:

从飞控的角度来说,垂直起降固定翼构型相比传统固定翼飞机更有挑战性,因为:
1. eVTOL普遍采用分布式动力(Distributed Electric Propulsion, DEP), 动力系统对机翼和机身的气流影响更加复杂
2. eVTOL在起降和巡航状态之间的转换阶段有较为复杂气动特性
3. 传统飞机设计较为相似,有些机型甚至可以仅依赖经验数据就能推算出较为准确的气动数据,而eVTOL大多构型新颖,且构型之间的差异较大,无法依赖经验数据
而对于多旋翼机型,由于本身的飞行主要依赖旋翼的转动而不是机翼的气动,甚至不需要精准气动模型即可实现控制,且本身的飞控模式与垂直起降固定翼的旋翼阶段是一致的,因此后续讨论只针对垂直起降固定翼,不针对多旋翼进行单独讨论。
接下来我们按“建模(Modeling)→配平(Trim)→控制律设计(Control Law Design)”的框架来分析不同构型的特点。
建模 (Modeling)
建立能够在全飞行包线范围内准确反映飞机动力学特性的模型是飞控设计的基础。对于eVTOL的机型,建模时不仅仅要考虑全飞行包线范围的气动特性,还需要考虑动力系统自身产生的力与力矩。其中,动力系统与机体气动的相互影响是不同构型之间需要特别注意的点。
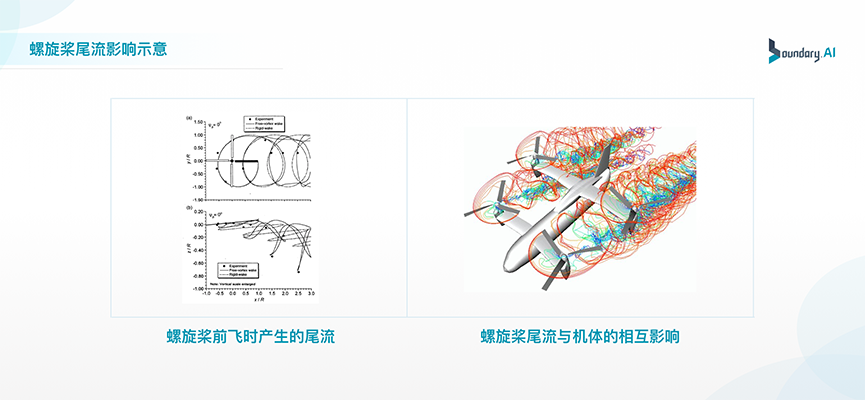
飞机在运动中动力系统对周围气流带来的变化会对飞机的气动特性产生较大影响,比如螺旋桨的尾流、倾转翼面的加速气流等;同时,机翼的气动外形也会对动力系统的性能造成影响,例如机翼可能会受益于边界层抽吸效应(Boundary Layer Ingestion, BLI)产生更大的升力,涵道风扇受到机翼影响产生进气畸变,导致动力效率有所降低。
因此,在建模中不能仅考虑静态的气动特性。这一影响不仅取决于飞机构型,还取决于构型的具体布置形式。主要影响包括:
1. 如果螺旋桨离机翼较近,在旋翼与固定翼阶段的转换过程中,机翼的气动特性会受到螺旋桨尾流影响。
Archer Maker的螺旋桨气流动态演示
2. 对于倾转机翼,流经翼面的气流会被动力系统加速,从而机体本身的气动特性会受到影响,例如翼面上有气动舵面其操纵效能也会发生变化。
3. 对于将分布式电动涵道风扇(Electric Ducted Fan, EDF)布置在机翼后缘的倾转动力构型,情况会变得更复杂,还需要考虑机翼的气动外形对动力造成影响。
一方面机翼受益于边界层抽吸效应产生更大的升力。另一方面涵道风扇受到机翼影响产生进气畸变,导致动力效率有所降低。这种飞行器外流与推进器之间的飞发耦合特征也使建模的难度增大。
Lilium转换阶段气流演示
小结
在不同构型在建模中的差异点如下:
1. 复合翼构型与倾转动力构型均需要考虑旋翼尾流对机翼气动特性的影响
2. 倾转动力构型中的倾转机翼构型需要重点考虑电机对气流的加速作用
3. 倾转动力构型中的分布式EDF不只要考虑BLI对机翼气动特性影响,还要考虑机翼造成EDF进气畸变对动力效率的影响
配平 (Trim)
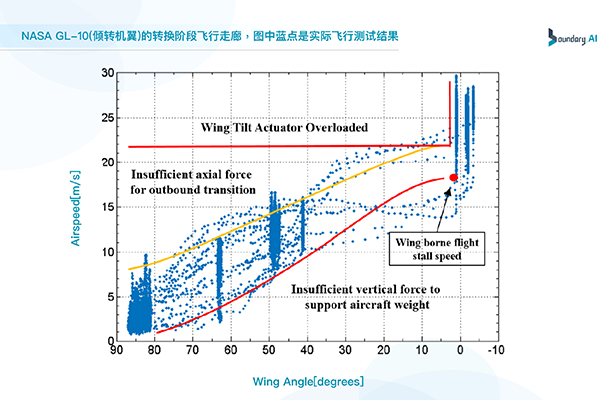
eVTOL转换过程中稳态飞行可以算得上是eVTOL的最大难题之一。此时飞机既不是固定翼状态,也不是旋翼状态,而是介于两者之间的中间状态,有着较为复杂的非线性动力学特性。因此,在进行控制律设计之前,需要评估飞机在转换阶段的稳态飞行走廊,来确认飞机能否在旋翼和固定翼构型之间稳定过渡。能够稳态飞行的状态也被称为配平点。
由于目前DEP被广泛使用,并且很多eVTOL设计含气动舵面,这就使满足配平的执行器输出常常有无数种组合,此时我们可以将配平点求解视为带约束的优化问题,给出评价指标,例如能耗、转换时间、距离等,从而求得最优解。
飞机在转换过程中不仅要能在各前飞速度下稳定飞行,还需要有一定的爬升、下降、加减速能力,对于倾转动力这种转换过程中有高度非线性动力学特征的系统,可将配平工作点随前向速度、前向加速度、垂向速度、垂向加速度的4维插值表,用于转换轨迹规划、控制系统前馈、以及线性化。不过这样做也使配平点数量大大增加,例如取20个前向速度,3个垂向速度,3个前向加速度以及3个垂向加速度,就需要20*3*3*3=540个点。

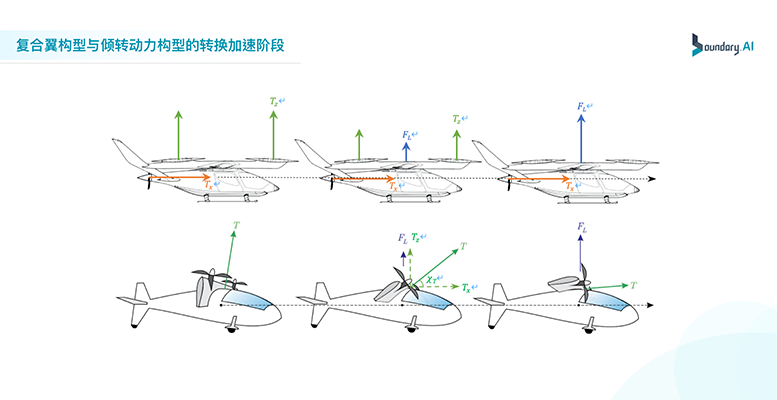
复合翼构型由于采用两套相对独立的动力系统,前向推力与垂向拉力基本解耦,因此在转换阶段有更好的操纵性。
而对于倾转动力构型,升力和推力都是取决于电机不同倾转角分解出来的力,需要考虑互相影响,难以任意指定所需的前向拉力与垂向拉力,非线性更强,因此配平的难度也更大。同时,电机倾转角度还会受到其他限制,例如悬停飞行阶段在90°附近,固定翼飞行阶段在0°附近(相对飞行方向)。随着整机尺寸与重量增大,倾转机构的作动速度也会进一步下降。
小结
在不同构型在配平中的差异点如下:
1. 复合翼构型由于采用两套相对独立的动力系统,前向推力与垂向拉力基本解耦,因此在转换阶段有更好的操纵性。
2. 而对于倾转动力构型需要考虑互相影响的因素更多,非线型更强,因此配平的难度更大。
控制律设计 (Control Law Design)
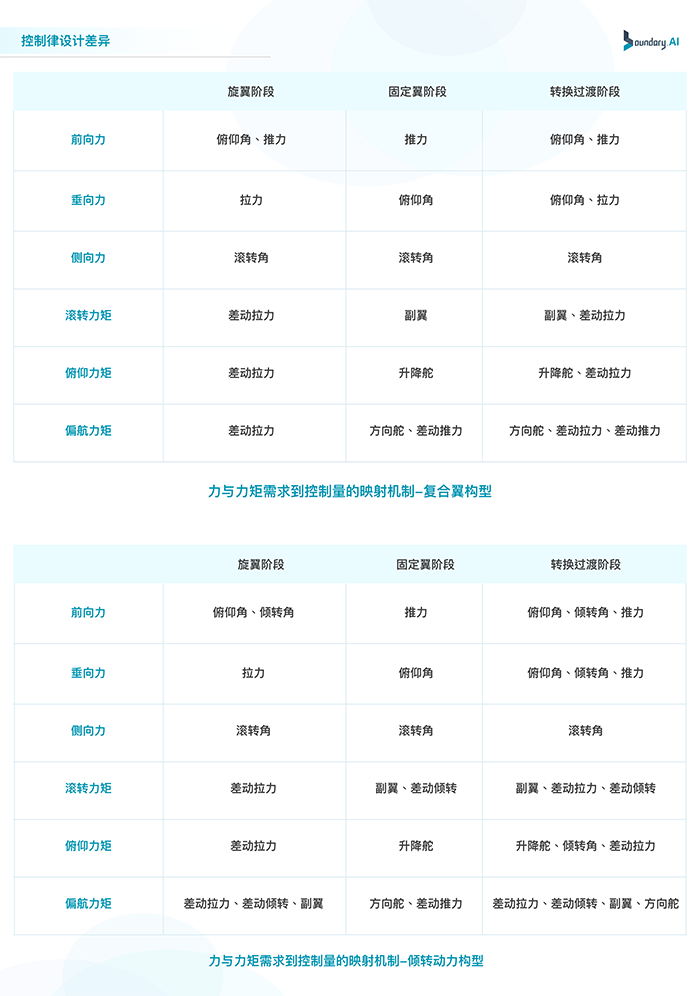
在控制律的设计中,不同构型的差异主要在于各飞行阶段下控制量产生的力与力矩机制不同。
一种自然的思路是设计两套控制律,一套旋翼阶段使用,一套固定翼阶段使用,在转换阶段则逐渐改变这两套控制律之间的权重逐渐过渡。还有一种思路是既然在转换阶段不同速度下的动力学特性差别很大,那不妨针对不同速度各自设计一套控制律,“分而治之”。
上述两种思路都涉及到两套甚至多套控制律切换,也就是我们称之为调度控制方式(Scheduled Control Approach), 就会导致一个问题:我们期望的力与力矩无法被准确分配。例如,旋翼控制器给低头的俯仰角指令用于前向加速,而设计的固定翼控制器给出抬头的俯仰角指令用于间接增加迎角从而爬升,结果两个控制器各自取权重后混合得到的俯仰角指令使的垂向爬升和前向加速都没能被完全满足。因此,如果采用调度控制方式,控制设计将变得十分复杂,面对不同的构型将需要重新做大量的开发工作。
然而统一控制是可以实现的。用统一控制方式的控制算法也有多种,例如非线性模型预测控制(Nonlinear Model Predictive Control, NMPC),增量非线性动态逆(Incremental Nonlinear Dynamic Inversion, INDI)等。在我们的控制实践中, INDI有优异的特性与性能。
值得一提的是,由于INDI在每一时刻都进行线性化,得到每一个作动器的力与力矩操纵效能,因此具备两个很好的性质:
1. 不管是复合翼构型的拉力、推力输出,还是倾转动力构型的倾转机构角度,对INDI而言,它们仅仅是作动速度不同、操纵效能不同的作动器。因此,不只某一特定构型的控制方式得到统一,不同eVTOL构型的控制同样以优美的方式得到一致表达。
2. 减轻控制增益调度设计的工作量。例如对于倾转动力构型,若基于上一小节提到的利用4维插值表给出的超过500个配平点来进行线性化与控制参数设计,显然不是一项轻松的任务。而INDI则相当于每一时刻在线自动线性化并根据效能矩阵对增益调度,从而有效减少人的设计工作。
小结
1. 不同构型在控制律设计中的差异点取决于控制方式
2. 采用调度控制方式飞控设计将变得十分复杂,面对不同的构型将需要重新做大量的开发工作。
3. 采用统一控制方式,如INDI,可以实现在不同构型之间的适配时,不需增加太多算法开发,只需要根据构型调整控制分配等部分模块。
飞控之外
总体来说,不同构型在飞控上确实存在不同关注点,但是如果在飞控系统架构设计之初做好规划,可以规避不同构型之间的大部分差异,形成通用型的控制系统。
设计一款eVTOL飞机决定采用哪种构型时,控制层面的考量只是其中一个因素,主机厂在飞机设计的过程中还需要综合考虑使用气动效率、机械结构、维护性、电气特性、便捷性、声学特征、美观等各方面因素,在机型设计之外还需要权衡飞机的技术实现难度、成本应链管理、适航取证等等,才能完成产品实现。
本文仅基于边界智控的实践经验,如有不完善的地方,请大家谅解。如果大家有不同看法,也欢迎给我们留言。
边界智控将始终与客户站在一起,提供安全、可靠、智能的飞控及航电解决方案,助力eVTOL机型和UAM行业的快速发展。
参考资料:
1. Leishman, Gordon J. Principles of helicopter aerodynamics with CD extra. Cambridge university press, 2006.
2. Shi, Xichen. Intelligent Control for Fixed-Wing eVTOL Aircraft. Diss. California Institute of Technology, 2021.
3. Ducard, Guillaume JJ, and Mike Allenspach. "Review of designs and flight control techniques of hybrid and convertible VTOL UAVs." Aerospace Science and Technology (2021): 107035.
4. Fredericks, William J., et al. "Greased lightning (GL-10) flight testing campaign." (2017).