eVTOL,作为航空领域革命性产品,将通过大幅降低航空运输成本撬动城市空中出行的市场,其运营成本将是影响市场规模的关键因素。自动飞行功能,则为现代飞机降低了驾驶门槛,进而减少运营成本,并且提高了飞行安全性。
因此,自动飞行功能成为了eVTOL的必备,未来三五年内首批完成适航取证并投入运营的eVTOL都应具备该功能。
自动飞行功能的实现,需要通过飞行管理系统(FMS)和飞行控制系统(FCS)共同完成,而在eVTOL上,出于简化操作、轻量化、集成化和经济性的考虑,这两套系统的综合化设计将成为发展趋势。此外,这个综合化的趋势,也将更好的适应未来eVTOL从自动飞行升级到完全自主飞行。
什么是自动飞行系统?
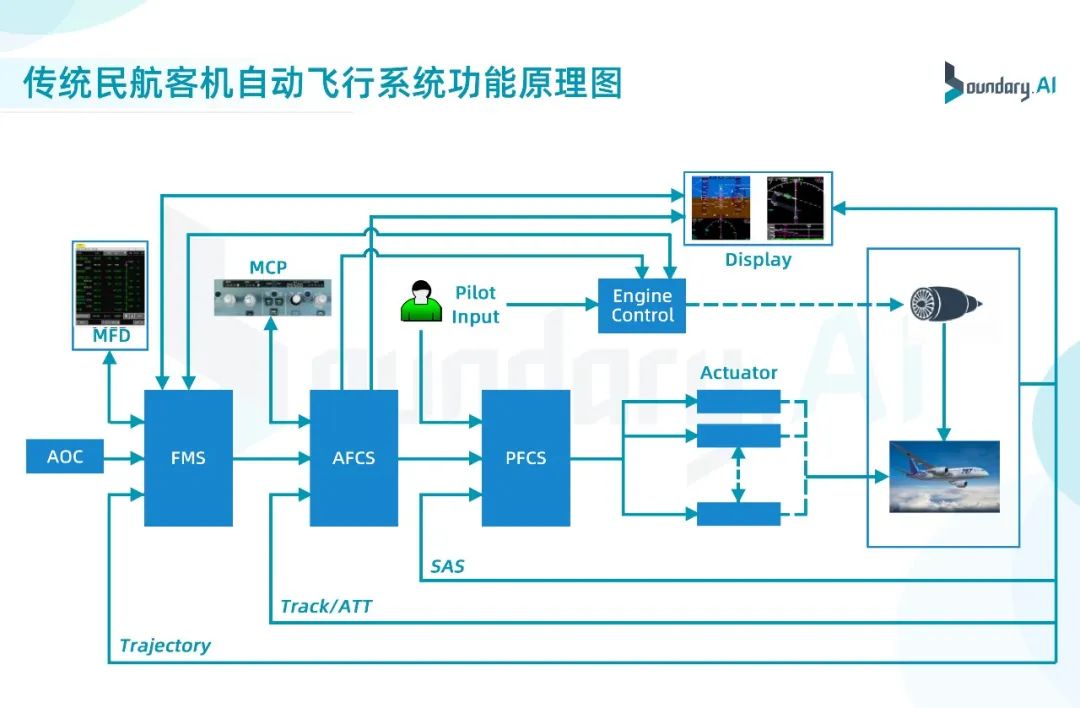
传统民航客机的自动飞行通过信息感知、决策计算和响应执行三个功能模块实现。其中,决策计算和响应执行模块由飞行管理系统和飞行控制系统共同协作实现。在硬件的分布上,飞行管理系统一般驻留在综合模块化航电平台(IMA)中,而飞行控制系统一般集成在独立的多冗余飞行控制模块(FCM)中。
什么是飞行控制系统?
飞行控制系统,简称飞控系统,传统民航客机的飞控系统由飞行增稳控制的内回路和控制航迹、姿态的外回路组成。前者为主飞行控制系统(PFCS),后者为自动飞行控制系统(AFCS)。
主飞行控制系统中,飞行增稳控制是最重要的功能,其主要目的是通过增稳或控制增稳控制律,调节飞机纵向短周期模态、横航向滚转和荷兰滚模态特性。此外,主飞行控制系统还具备飞行包线保护功能,可以对速度、过载、姿态和角速率等控制指令进行限幅,实现边界限制来提高飞行安全性和可靠性。
自动飞行控制系统一般包括自动驾驶仪(AP)、飞行指引(FD)和自动油门(A/THR),在三者的联合工作下可实现对飞机的速度、高度、姿态和航向、航迹的控制。
什么是飞行管理系统?
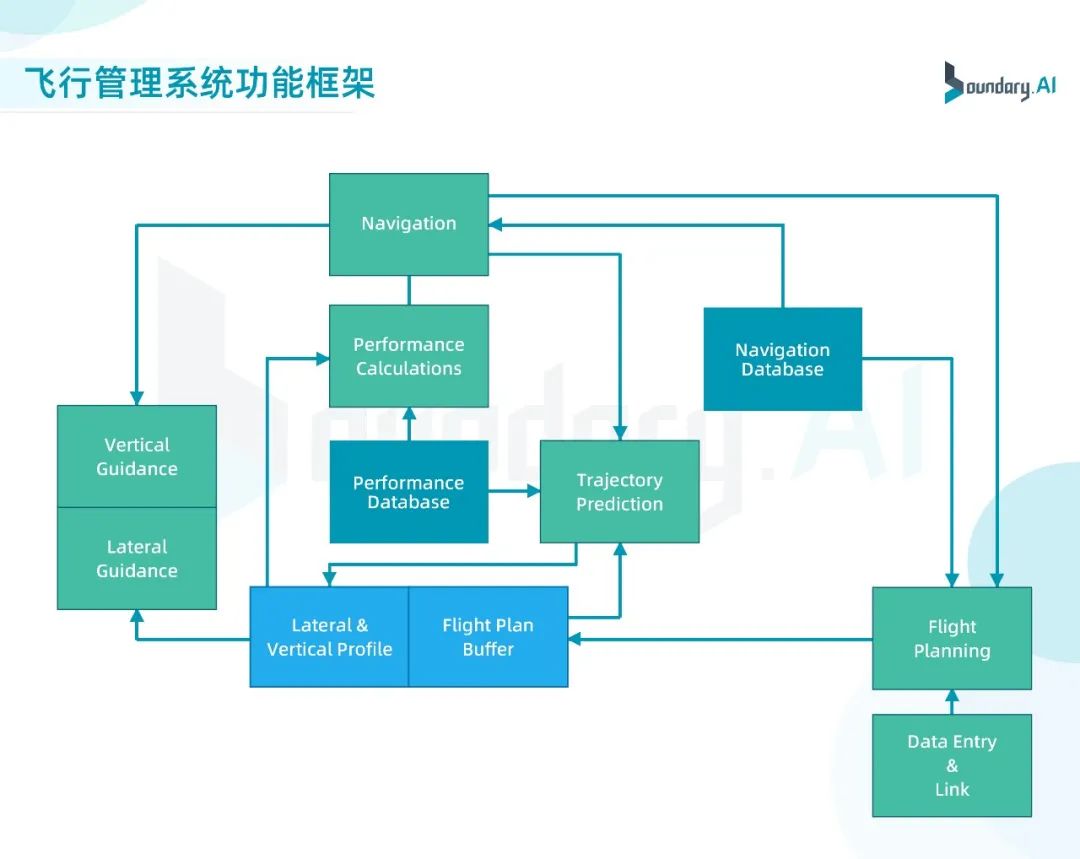
民航客机的飞行管理系统主要包括飞行计划管理、综合导航、性能计算、航迹预测和飞行引导功能。可实现基于多传感器的导航计算、基于导航数据库进行飞行计划构建和修改、基于性能数据库进行航路点速度和高度优化、基于航迹预测功能计算水平航迹和垂直剖面、基于飞行引导功能进行水平/垂直制导模式管理和制导指令计算等多方面的能力,并通过与自动飞行控制和自动油门系统交联提供自动飞行能力,可有效提高飞行安全性和经济性。
飞行管理系统的发展历史
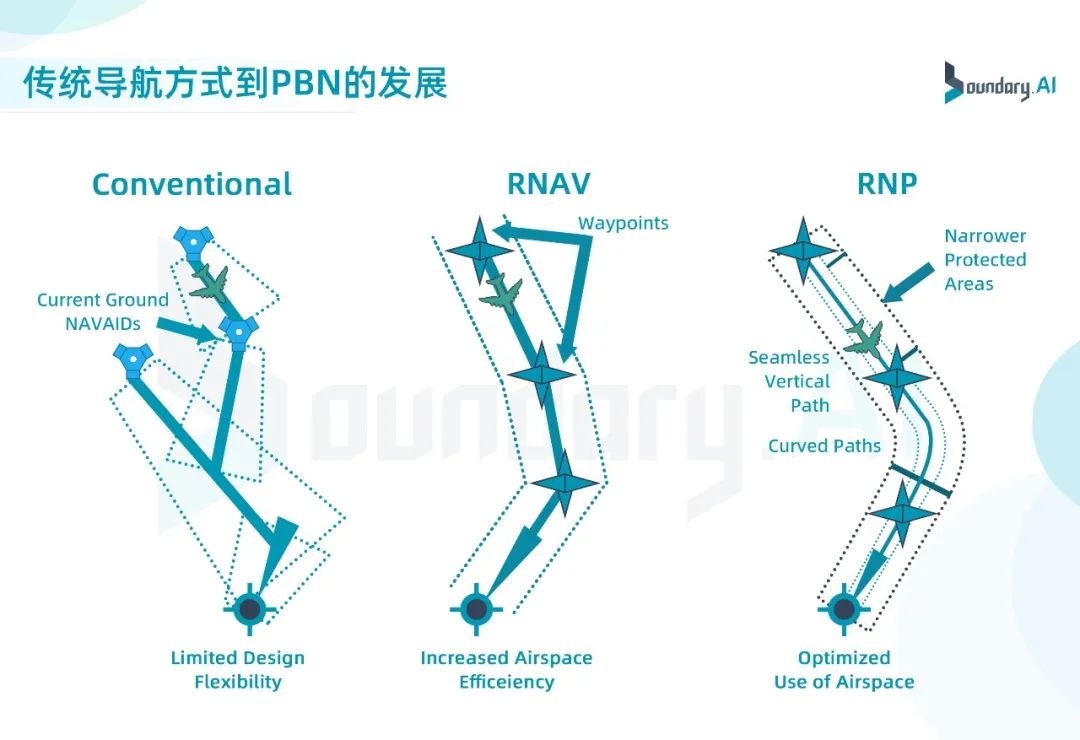
飞行管理的概念最早可以追溯到上世纪20年代,其初始功能是位置定位和航程估算。随着电子导航技术的发展,自动定向仪(ADF)、甚高频全向无线电信标(VOR)、测距仪(DME)、仪表着陆系统(ILS)、惯导参考系统(IRS)被广泛应用到飞机上,飞机可以通过惯性系统和无线电设备进行导航计算。
在20世纪90年代引入卫星导航系统(GNSS)后,飞管系统的导航源优先选择以GNSS或组合导航提供的位置,飞机可不依赖于无线电导航台,实现了卫星导航覆盖地区任意飞行(RNAV)。随着卫星导航精度的提升以及卫星增强系统的应用,飞管系统增加了机载导航性能监视和告警功能,可提供所需导航性能(RNP)程序运行,满足了基于性能的导航(PBN)运行响应的规范要求。
计算机技术的发展又为飞管系统带来了更强大的航迹预测和性能优化的能力。将飞行计划和飞机性能数据等信息相结合,可进行优化高度和优化速度等数据计算,并精确预测各航路点的到达时间和剩余燃油,得到预测的水平轨迹和垂直飞行剖面。在结合自动飞行控制系统和自动油门系统对飞行任务进行飞行制导的同时,还可实现所需到达时间(RTA)控制能力。此外,飞管系统还具备数据库管理、数据链通信和场面引导等功能。
自动飞行系统在传统民航客机的实现案例
对于波音、空客等主流民航客机,自动飞行系统是由飞管系统和飞控系统耦合实现的。该系统提供飞行任务自动执行能力,极大地减轻了飞行员工作负荷,使得飞行员可以更专注于执行其他飞行操作,提升了飞行安全。
波音B787自动飞行系统
B787的自动飞行系统包括飞行管理系统、模式控制面板(MCP)、自动驾驶指引系统(AFDS)和自动油门系统,其中AFDS包括自动驾驶仪和飞行指引,AFDS通过电传飞控系统(FBW)控制各操纵舵面。
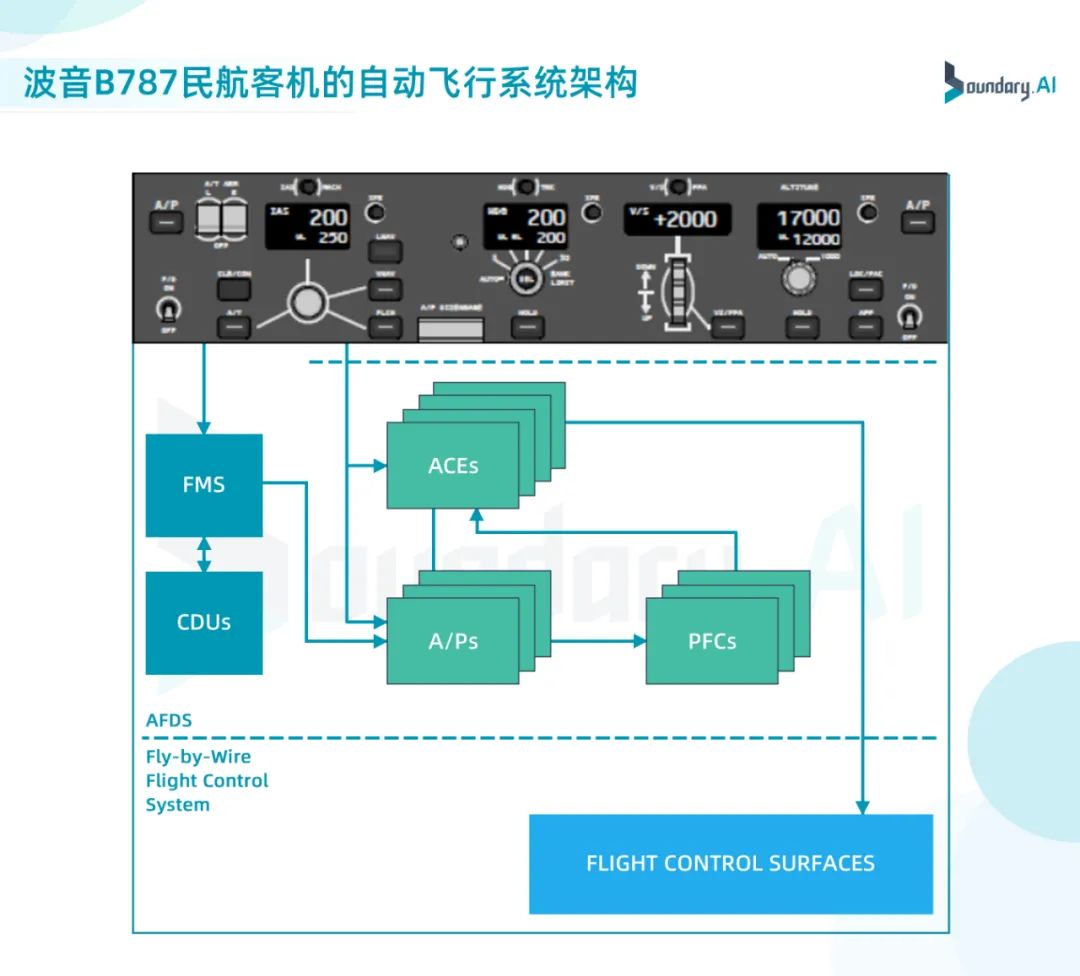
其功能实施过程为:飞管系统通过对数据链下发或者MFD输入的飞行计划进行确认并激活,然后对激活的飞行计划进行性能优化计算,通过航迹预测功能计算得到期望水平/垂直轨迹,对比综合导航模块提供的实时导航数据,通过飞行引导模块进行水平/垂直引导指令计算,并输出到自动飞行控制系统,完成导航制导功能。自动飞行控制计算机收到姿态、速度等水平/垂直制导指令并通过自动驾驶仪模块进行外环控制律解算,得到过载、角速率等内环增稳控制指令,随后通过主飞行控制计算机进行控制律计算,得到操纵舵面作动器控制指令,从而实现飞行控制功能。
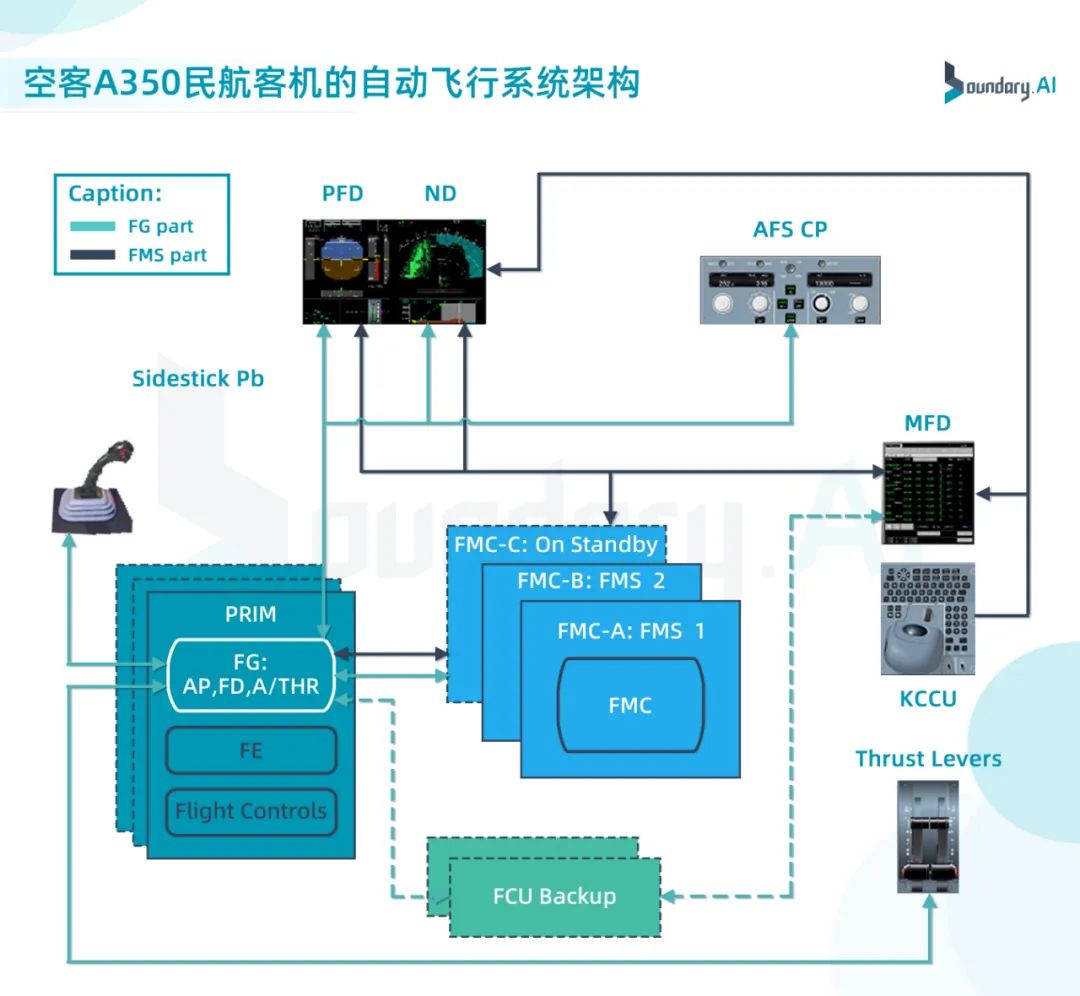
空客A350自动飞行系统
A350的自动飞行系统由3个主飞行控制和引导计算机(PRIMs)和3个飞行管理计算机(FMCs)组成,其中PRIMs包括自动驾驶仪、飞行指引和自动油门。空客对自动飞行系统的子系统划分与波音不尽相同,但其功能原理是一致的,实施过程也是接近的。
自动飞行系统在eVTOL的设计考虑
eVTOL的自动飞行系统功能划分与传统民用飞机大致相同,决策计算都是通过飞管系统和飞控系统协同实现的。然而,由于eVTOL在运营场景、运营成本和飞机本体等方面具有其特殊性,其自动飞行系统的设计面临不小的挑战,包括:
1.同等级的安全要求
对于用于载人低空出行用途的eVTOL,以EASA为代表的局方要求机载电子系统将参考25部适航条款进行适航取证,保证整机的灾难性事故概率小于10-9。
2.低运营成本的追求
为了适应未来低空出行常态化的需求,运营成本问题至关重要。在实现无人驾驶之前,其运营成本主要体现在飞行员资质培训和航线使用相关业务上。大幅降低驾驶门槛、使用具备自动飞行功能的eVTOL是必然选择。
3.更小型的飞机
实现垂直起降和悬停的功能,使得eVTOL的重量和功耗受限于现有电池技术。因此,飞控和其他机载系统的轻量化、小型化和低功耗是设计上的一大挑战。
4.更复杂的构型和执行机构
eVTOL具有旋翼模式、过渡模式和固定翼模式三种飞行构型,自动飞行系统设计需考虑三种构型下飞行控制的实现形式。在静不稳定的旋翼构型和过渡构型下,增稳控制包含速度、过载和姿态控制,不再与传统的自动飞行控制系统(AFCS)和主飞行控制系统(PFCS)保持一致。
5.无人驾驶的趋势
作为代表未来的革命性航空产品,eVTOL的设计还须考虑未来的无人驾驶需求,以满足更大规模的低空出行市场。

未来eVTOL的低空运营将形成高密度的城市上空航线
飞机与汽车系统设计综合化趋势
随着人们对功能和性能需求的不断增加,同时希望以更低的成本提供产品和系统实现能力,正在促使航空航天和汽车行业从分布式联合架构向综合集成式架构转变。其中,综合模块化航电系统(Integrated Modular Avionics, IMA)和域控制器(Domain Control Unit, DCU)技术是两个比较典型的例子。
IMA
IMA的核心理念是硬件共享,即不同的航空电子系统软件共享相同的处理单元。因此,可以通过共用核心处理器、数据总线和I/O接口等降低成本。此外,还可以实现机载系统设计的其他关键指标,如重量、尺寸和能耗的降低。具体的IMA技术发展可以参考文章《航电系统架构:演变历史和电动航空时代的展望》。
DCU
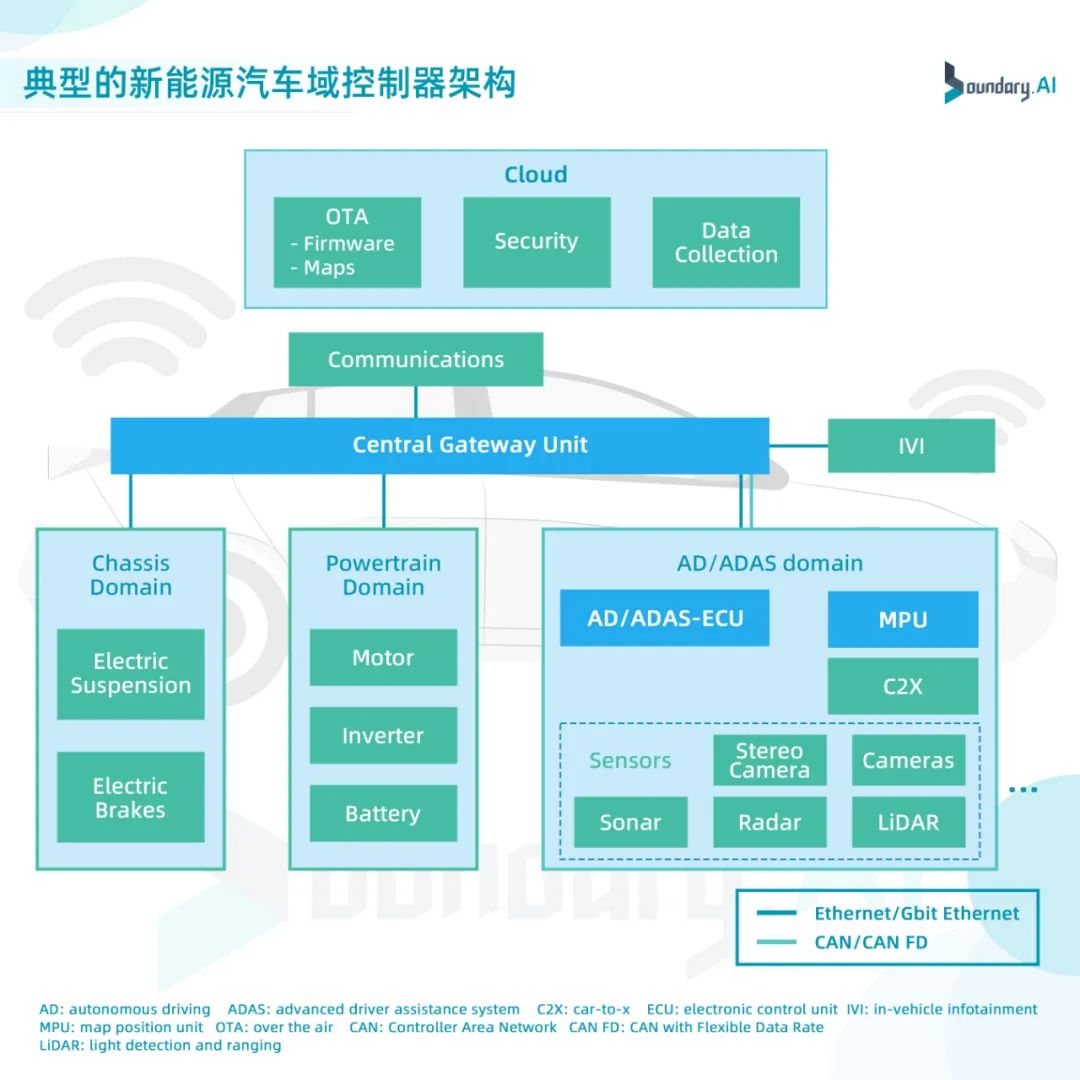
随着电动化、智能化和信息化趋势的不断发展,为了解决传统分布式EEA存在的ECU数量增多、线束设计繁琐和控制逻辑复杂等问题,汽车行业工程师们逐渐把许多功能相似且分离的ECU功能集成到一个比ECU性能更强的处理器硬件平台上,也就是汽车的域控制器。
域控制器是汽车每一个功能域的核心,它主要由域主控处理器、操作系统和应用软件及算法等三部分组成。平台化、高集成度、高性能和兼容性是域控制器的主要核心设计思想。依托高性能的域主控处理器、丰富的硬件接口资源以及强大的软件功能特性,域控制器能将原本需要多个ECU实现的核心功能集成进来,极大提高系统功能集成度,再加上数据交互的标准化接口,因此能极大降低车载电子系统的开发和制造成本。
一般来说,eVTOL内部空间与商务乘用车相当,而eVTOL机载电子系统相比车载电子系统的复杂程度更高。因此,eVTOL航电系统(包含飞控系统)的设计难度相比于复杂车载电子系统将具有更大的挑战性。随着众多汽车厂商(如大众、现代、丰田、本田、吉利等)布局eVTOL,它们在带动汽车、航空上下游供应链发展的同时,也会积极尝试成熟的汽车电子先进技术在eVTOL上的应用和优化。
当然,eVTOL的研发工作仍须以飞机/系统安全性、功能设计、系统/软硬件开发、集成、确认和验证等正向过程为基础,但在某些方面借鉴发展得更加成熟的新能源汽车,有机融合汽车产业的先进技术,是eVTOL厂商需要积极面对的。
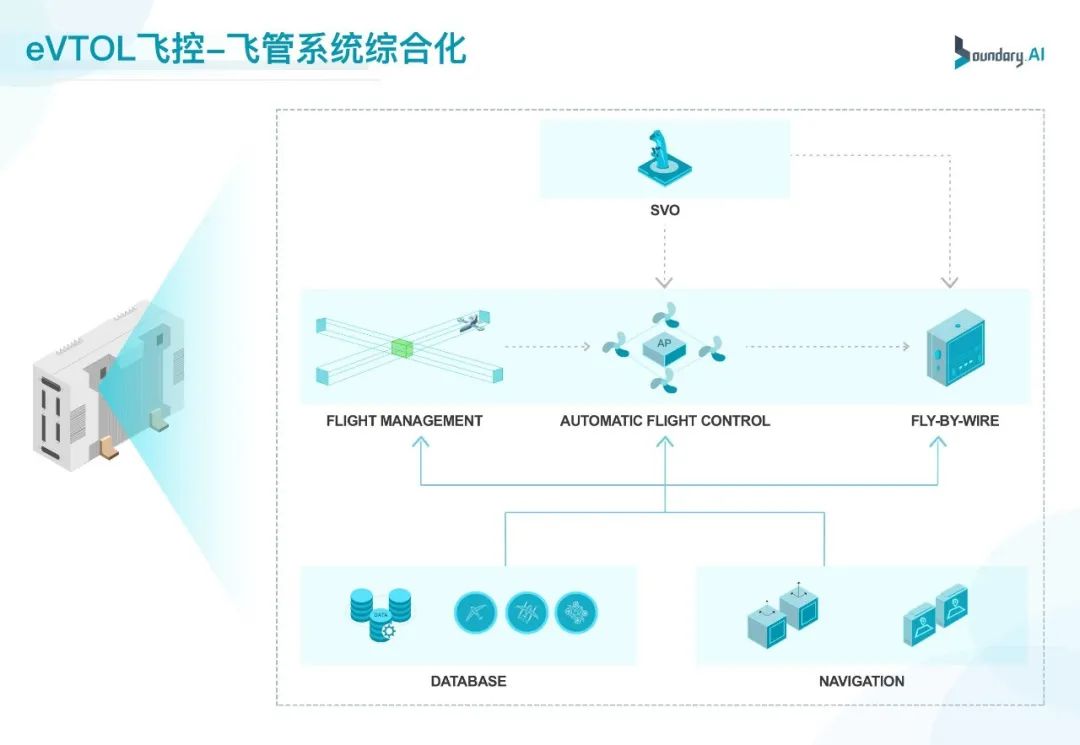
eVTOL飞控-飞管系统综合化发展趋势
eVTOL飞控-飞管系统综合化分析
为了解决eVTOL空间布局、重量限制、运行安全和运营成本等问题,可以参考民机综合化航电和汽车域控制器的发展趋势,对eVTOL自动飞行功能实现进行综合化设计,可将飞管系统从IMA中剥离出来,与飞控系统共同集成在飞行控制模块(Flight Control Module, FCM)中,其必要性和可行性分析如下:
必要性
飞管系统中的性能计算功能实现与飞控系统的飞行模式(旋翼、过渡和固定翼)严格相关,飞行制导功能又与飞控系统的飞行模式和飞行控制模式(速度或姿态控制)直接相关。飞控和飞管系统综合化设计,将大大减少系统相互依赖和数据交互量。
飞控和飞管系统综合化设计将大量减少系统间数据总线和接口数量,进而减少机载系统使用空间并降低产品重量,可以适配更多的任务载荷,从而提升eVTOL作为低空出行工具的经济性。
对于eVTOL飞控模式设计,一般将速度或姿态控制作为常规控制模式,而所需的速度或姿态数据指令,将由飞管根据飞行计划和飞行引导功能计算得到,飞管和飞控系统综合化设计将减小该数据的延迟时间并保证传输数据的准确性,从而达到更高的飞行制导精度,降低对空域的使用要求,提升eVTOL运行的安全性。
eVTOL的最终形态是无人驾驶,对航迹规划和飞行引导的安全性要求将会非常高(特别是垂直起降阶段),飞管系统的研制保证等级则与飞控系统同样为A级,综合化将减少机载电子硬件数量,也将带来适航取证成本的降低。
可行性
与汽车的域控制器技术设计理念相同,飞管和飞控系统在导航大气等传感器数据输入、执行指令生成、处理器平台、操作系统和电源使用等方面,有很多功能和性能实现具有相似性。
eVTOL飞控计算机硬件基本采用高性能的ARM架构处理器,其强大的分时分区性能和资源分配能力将保证飞管和飞控功能实现,满足系统综合化研制的可行性。
eVTOL飞控-飞管系统综合化的实现形式
根据我们对现有eVTOL产品的理解以及对未来技术发展的展望,综合化设计是eVTOL自动飞行系统的整体发展趋势,而这种综合化设计我们认为可通过以下两种方式进行实现:
1.集成于同一处理单元
飞管和飞控软件分时分区集成在同一块处理单元上,其优点是数据交互可通过操作系统通信机制来实现,内部数据接口简单且高效,但对处理器算力和资源分配能力要求非常高,且系统间的功能耦合带来的软硬件更改问题会增加适航成本。
2.驻留在不同通用处理模块
飞管和飞控软件分别驻留在不同处理单元,其功能实现和安全性设计可在硬件上实现解耦,适航认证将较方法1更为容易,缺点是增加了处理器单元,飞控计算机的SWaP(Size, Weight and Power,大小、重量与功耗)指标也将随之增加。
当然,eVTOL自动飞行综合化设计还没有一个成熟的解决方案,特别是在城市内和城际运行的场景下,导航数据库将会比传统民机更为复杂,而由于eVTOL具有多种飞行构型和气动特性的原因,飞管的性能优化功能会带来更为繁杂的运算量,这些因素对于A级软件功能的实现都将成为巨大的挑战。
写在最后
作为新兴行业,我们对eVTOL自动飞行功能的理解和认知也是有限的,对于自动飞行系统综合化发展趋势的分析和判断也未必完全正确。
期待认真阅读本文的eVTOL相关从业者,与我们保持交流,也希望我们的文章,对正在进行eVTOL机载电子系统设计和研发的从业者们,有一定的帮助。
参考文献:
1、王金岩、孙晓敏、齐林,《民用飞机飞行管理系统》
2、陈宗基、张平,《民用飞机飞行控制系统设计的理论与方法》
3、GJB 3819-99《有人驾驶飞机自动飞行控制系统与增稳系统、控制增强系统通用规范》
4、Donald Mclean. Automatic Flight Control Systems
5、B787 Flight Crew Operations Manual
6、EASA. Means of Compliance with the Special Condition VTOL
7、Khaleel Qutbodin. Merging Autopilot/Flight Control and Navigation-Flight Management Systems
8、Patent US 6443399 B1. FLIGHT CONTROL MODULE MERGED INTO THE INTERGRATED MODULAR AVIONIS
9、Tomas Edwards & George Price. eVTOL Passenger Acceptance